人とくるまのテクノロジー展 2026 NAGOYA 取材記事。
自動運転レベル4による移動サービスの実用化への期待が高まる一方、車載センサのみに依存するシステムには限界がある。また、見通しの悪い交差点における歩行者や自転車、路上駐車車両の陰など、いわゆる「センサの死角」に対する安全確保が大きな課題となっている。
解決の鍵は、路側機や他車両のセンサ情報を共有する「協調認識(Cooperative Perception)」の技術。
中でも名古屋大学の研究コンソーシアムが開発した「ダイナミックマップ2.0」は、車両や歩行者の動的情報(位置・速度など)と静的地図を統合・集約し、リアルタイムで共有する情報通信プラットフォームとなっている。
1.「ダイナミックマップ2.0」の注目点
「死角」をなくす協調認識と「分散型」アーキテクチャ
- 単独センサの限界を突破:車両のセンサだけでは検知できない交差点の死角や路上駐車の陰などを、路側機(インフラ)や他車両と通信して補う「協調認識」の実現。
- 「ネットワーク分散型」によるリアルタイム性の確保:クラウド、エッジ、車両で処理を分散させる仕組みを採用。これにより、大規模なデータ処理による遅延を防ぎ、衝突回避などに必要なリアルタイムな情報共有を可能にした。
豊富な実証実績とソースコードの「無償公開」
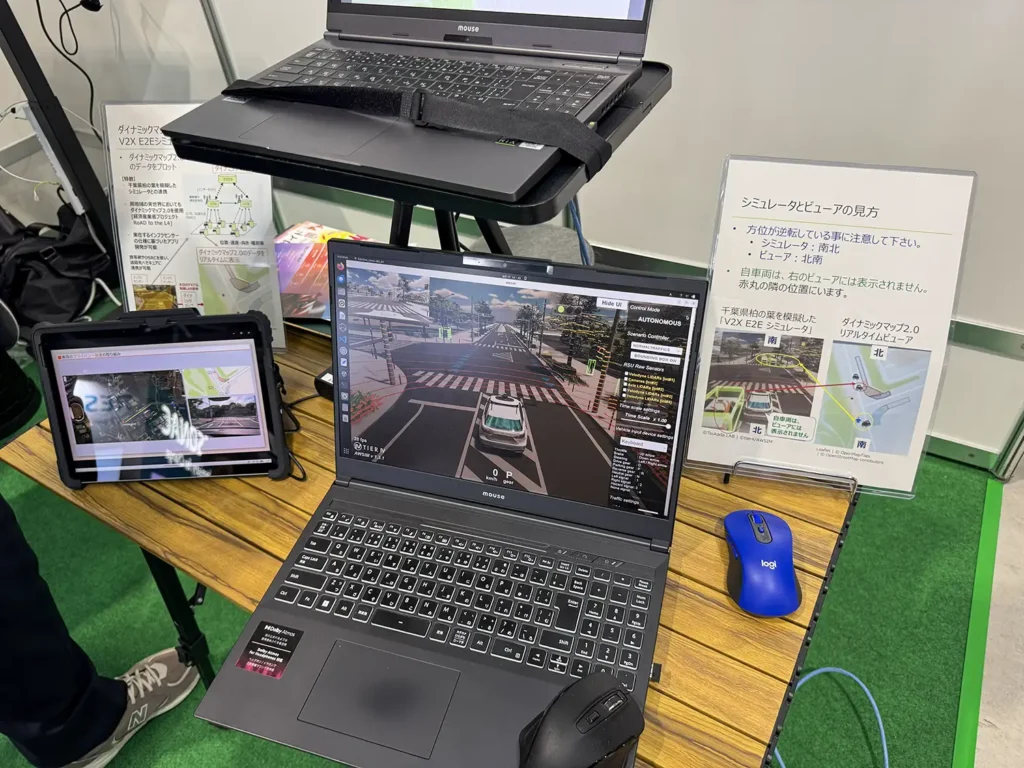
- 実社会での運用実績:千葉県柏の葉での自動運転バスへの交差点情報連携や、愛知県の公共施設における自動バレーパーキング(駐車場内の空きスペース情報の算出・連携)など、すでに具体的なフィールドで実証結果を出している。
- GitHubでの無償公開による「民主化」:開発されたプラットフォームのソースコード(MITライセンス)やAPI仕様が公開されている。これにより、自治体や交通事業者が一から高額なシステムを開発する必要がなくなり、導入に向けたハードルが劇的に下がる。
自動運転にとどまらない「次世代交通サービス」への拡張性
- 単なる安全走行の支援だけでなく、将来的なビジネス展開を見据えた研究が組み込まれている。
- 例えば、自動運転システムとの連携(End-to-End AIとの情報連携)や、より広域な自動バレーパーキング、ロードプライシング(課金システム)、ダイナミックマップ利用料のためのマイクロペイメント機能など、スマートシティの基盤となるマネタイズやサービス化の構想が含まれている。
日本のガラパゴス化を防ぐ「共通基盤(協調領域)」としての役割
- 産学官連携による「コンソーシアム」という形態をとり、「共通化」を最大の目的としている。各社が個別に開発する「競争領域」ではなく、国全体で乗っかるべき「協調領域」の土台として機能することで、日本のモビリティ産業全体が世界に対抗するための重要な一手となる。
2.コンソーシアムについて
「ダイナミックマップ2.0」を開発したコンソーシアムの正式名称は「協調型自動運転のための情報通信プラットフォーム共通化コンソーシアム」。
これは名古屋大学、同志社大学を中心に活動していた「ダイナミックマップ2.0の高信頼化技術に関するコンソーシアム」を発展させた後継プロジェクトで、今度は社会実装、共通化、普及までを主眼とした活動内容となっている。
- 共通活動:協調型自動運転向け情報通信プラットフォームの開発・共通化を推進。また、都市交通最適化に向けた新たな交通サービスの実装や実証実験(愛知県春日井市高蔵寺などを予定)を共同で実施する。
- 個別活動:参加組織の課題に応じ、自社製品とダイナミックマップ2.0の連携機能開発や、外部実証実験への協力、技術者の育成などを個別にサポートする。

3.世界に対抗するための「足並み」と「継続支援」
コンソーシアムは2029年3月までの3年間を計画しており、今後は自動運転システムとEnd-to-End AIの連携、通信プロトコルの高度化(QUIC化)など、より高度な技術実証を進めていくようだ。
しかし、日本がこの分野で欧米や中国などの諸外国と渡り合い、真の社会実装を成し遂げるためには、技術開発以上に「国家的な投資の継続」と「産業界の連携」という2つの壁を打破する必要があるだろう。
近年、国の方針として他方面への支援優先度が上がり、相対的に協調型モビリティインフラへの予算やリソースが分散しているとの指摘がある。膨大な政府予算をバックに街全体のスマート化を一気に進める中国などの海外勢に比べ、こうした予算・リソースの差が進捗の遅れに直結しかねない。
さらに気になるのは、国内モビリティ企業間での「足並みの乱れ」。
例えば、一部大手では独自の研究を進めるなどしており、国内でのリソースの分散や二重投資が懸念される。主要企業が独自路線に走ってしまうと、せっかくのオープンな共通プラットフォームが孤立する事になる。これでは、日本発の技術で世界に立ち向かうことは夢に終わってしまう。
海外の圧倒的なスピードと規模に対抗するために、今まさに求められている2点を上げてみた。
- インフラ協調領域へのさらなる財政・政策的支援の増強
- 企業の垣根を越え、国全体で共通プラットフォーム(協調領域)に足並みを揃える協調姿勢
「ダイナミックマップ2.0」が無償公開された今こそ、行政はこれを一過性の研究プロジェクトとせずに継続的な支援を強化し、経営層は「競争」と「協調」の領域を明確に切り分けて、国内モビリティ産業の総力を結集すべきだろう。
点の実証を「面の社会実装」へと変えるための、官民一体となったドラスティックな舵取りを期待したい。
【取材・文・撮影】
ものシンク編集部
現役ITエンジニアの視点から、日本の「ものづくり」と「インフラ」の最前線を独自の切り口で紐解くWebメディア。
【取材協力・関連リンク】
Open SDV Initiative
公益社団法人自動車技術会